

Table of contents

No headings in the article.
Hi! Firstly, it's an absolute pleasure to have you here. This is my first article, so starting with something chill and lowkey would be fun. I plan to create a science journal, which would be so cool. As a kid, I would avidly write articles, so forgive me for having a moment because this feels surreal! Anyways going ahead. I don't know about you guys, but I have always had a knack for astronomy. The reason this field speaks to me so badly is because it's constantly evolving and pushing out the boundaries to bring out new things. Space is vast and unexplored, and robots can help us to explore it in ways that humans cannot. For example, robots can be sent to dangerous or inaccessible places, such as the surface of the sun or the interior of a black hole. Apart from these reasons, robots can be used to perform tasks that are too dangerous or difficult for humans, such as assembling spacecraft or repairing satellites. They can also be used to collect data and samples that would be too risky for humans to collect.
So in this article, I would like to help you in understanding the potential of robots used in space. And what better way to talk about Robotics in ISS (International Space Station)? Also, just a heads up this is a long article so feel free to divide your learning into parts or if you just want a gist or summary, read the poem in the end to get an overview. But it's an absolute sin to leave such an interesting topic to not be read.
So first! Lemme give you a brief intro to some robots in space. You know just to keep our horizons growing.
Robotics by definition is the study of robots which carry out jobs. So if you have any jobs you want someone to do for you then robots can suffice it. I think the laws of Robotics, honestly I get a laugh whenever I read them, can be the solution to your laziness. In the field of astronomy, robots are widely used. In fact, the primary role of robotics is to aid in astronomy. Machines like robotics arms and truss systems are connected to the ISS (International Space Shuttle), to move objects around. Sometimes, I wish I had something like that to move objects from one room to another so I don't need to get up. Anyways, space exploration has been made easier with the help of robots.
Machines like Voyagers have surpassed universes. Voyagers are a pair of interstellar( between stars or out of the universe in this context) robotic spacecrafts that have reached the farthest distance from our Earth. They were designed to study other planets. And they did! They have sent back data on Jupiter, Saturn, Uranus, and Neptune, and they have also studied the solar wind and interstellar space.
Then there are rovers on the surfaces of Mars like
Spirit- Spirit was a rover that landed on Mars in 2004. It was designed to explore the Gusev Crater, which is thought to have been a lake in the past. It could travel about 20 meters per hour, and it could climb slopes of up to 30 degrees. Spirit's mission was to study the geology of Mars, and it also looked for signs of life. Spirit's mission lasted for 2,265 sols (Martian days).

Curiosity- Curiosity is a rover that landed on Mars in 2012. It is the largest and most complex rover ever sent to Mars. Curiosity is equipped with a variety of scientific instruments, including a drill that can collect samples of Martian rocks and soil. Curiosity's mission is to study the geology of Mars, and it is also looking for signs of life. Curiosity is still active on Mars, and it has been exploring the Gale Crater since 2012.

Perseverance- Perseverance is a rover that landed on Mars in 2021. It is the most advanced rover ever sent to Mars. Perseverance is equipped with a variety of scientific instruments, including a drill that can collect samples of Martian rocks and soil. Perseverance's mission is to study the geology of Mars, and it is also looking for signs of life. Perseverance is still active on Mars, and it is exploring the Jezero Crater, which is thought to have been a lake in the past.

Opportunity-Opportunity was a twin rover to Spirit, and it landed on Mars in 2004. It was also designed to explore the Gusev Crater, and it was equipped with the same scientific instruments as Spirit. Opportunity's mission was to study the geology of Mars, and it also looked for signs of life. Opportunity's mission lasted for 5,111 sols (Martian days), making it the longest-running rover mission on Mars.

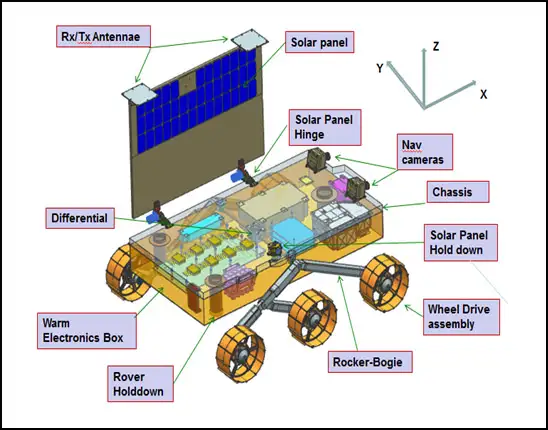
But what exactly is a rover you might ask? Well, a Rover is another robotic spacecraft that roves or moves around the surface of a celestial body either with the help of tracks or wheels. This helps in collecting data and many other things.
In the recent launch of Chandrayaan 3, in its payload, there is a Rover and also another probe called Lander. Now for an easy saying, I can't keep saying robotic spacecraft all the time right? Yes, so there is a name for robotic uncrewed spacecraft- probes! Just like our planet is Earth and it has different continents, uncrewed robotic spacecraft is a probe and there are different kinds of probes, like landers, rovers, and orbiters. So from now on I will be using the word probe, which is the shortcode for uncrewed robotic spacecraft.
Now what is a payload? It's part of a rocket specifically for storage. A rocket is divided into 3 parts- structure or frame, payload(storage unit) and propulsion(moving the rocket by thrust which is some kinda force.)
So going back to Chandraayan 3, in its payload we have 2 probes- Rover and Lander. A lander is a probe that is directly in contact with any celestial body to retrieve data.
If I were to give you an example, this is a weird one but remember Aamir Khan's character from PK? Yeah! So in many scenes upon holding people's hands he learns all about them and their mannerisms. He extracts that person's entire data by holding their hands.


Exactly in that way, a Lander retrieves data from the ground or any surface of a celestial body either by machinery legs or any other robotic gadget. These 2 probes in Chandrayaan's 3 payload help to achieve the mission's aim.
There are also some very very very cool technologies in these probes like
Lunar seismic activity(ILSA) -to get the info on lunar seismic activity,
Radio Anatomy of Moon Bound Hypersensitive ionosphere and Atmosphere( Rambha)-measures the plasma(ions or electrons) density,
3)Chandra’s Surface Thermophysical Experiment (ChaSTE)- carries out the measurements of thermal properties of the lunar surface near-polar region.
These 3 are a part of the Lander.
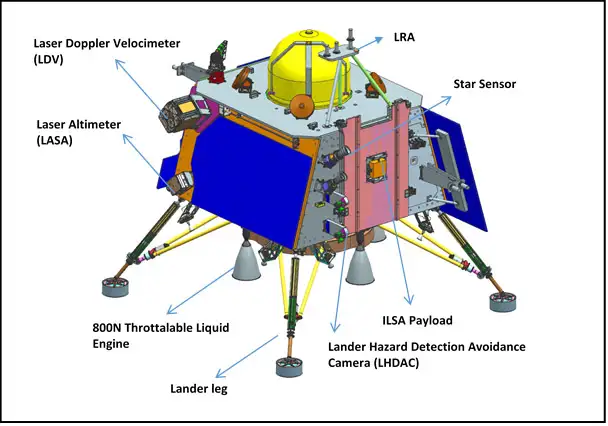
Coming to the rover,
- Alpha Particle X-ray Spectrometer(APXS)- this identifies the elements on the surface of the moon. How it works is soo cool. From a radioactive isotope like Curium 244 decaying is done then highly energised helium particles (2 protons and 2 neutrons) are released and they hit some surface to reach an excited state. Now because they have to reach the ground state, they release energy in the form of X-rays. Now these released X-rays detect the composition of elements. IK I am delving a lot into all this but these are so cool.
2)LASER Induced Breakdown Spectroscope(LIBS)- derives the Chemical Composition and infers mineralogical composition to further our understanding of the Lunar surface.
This is an actual breakdown of Chandrayaan 3. Because this article is not about it let's move ahead.
There are also robotic aeroplanes which are built in a way that can be operated without any pilots. Robotic landers, rovers, penetrators, manipulator arms, aerobots, cryo-bots, and snake bots are used to help in scientific discoveries in planetary motions. Penetrators, manipulator arms, aerobots,cryo-bots, snake bots etc that I have mentioned above are just fancy-named machines that are operated by robots to aid in activities in space.
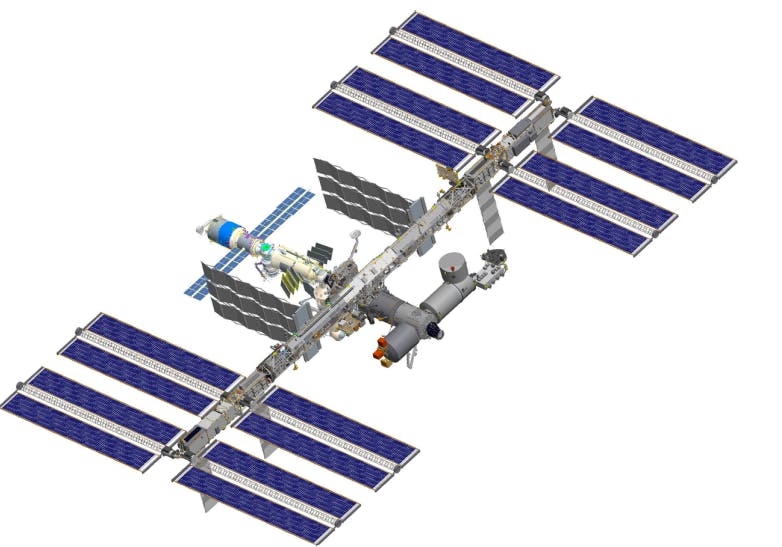
The majority of robotics in space used is in ISS. And all of the machines I have mentioned before are all in ISS, which is why it's a worthy topic to discuss when it comes to robotics in space. When fully assembled the ISS robotics complement will include three main robotic Manipulators arms(big word for arms that are used for manufacturing in astronomy), two small dexterous arms(arms that handle tasks with high precision) and a mobile base and transporter system.
Don't panic out bear with me Ik it's a lot to take in. I mean I have mentioned so much. But it's very interesting cuz how so many machines come together and give you the main space agency-ISS. Giving you a brief on who operates- the space shuttle is operated by 5 countries or space agencies- NASA(National Aeronautics and Space Administration), CSA(Canada Space Agency), ESA(European Space Agency), RSA(Russian Space Agency) and JAXA( Japanese Aerospace and Exploration Agency).
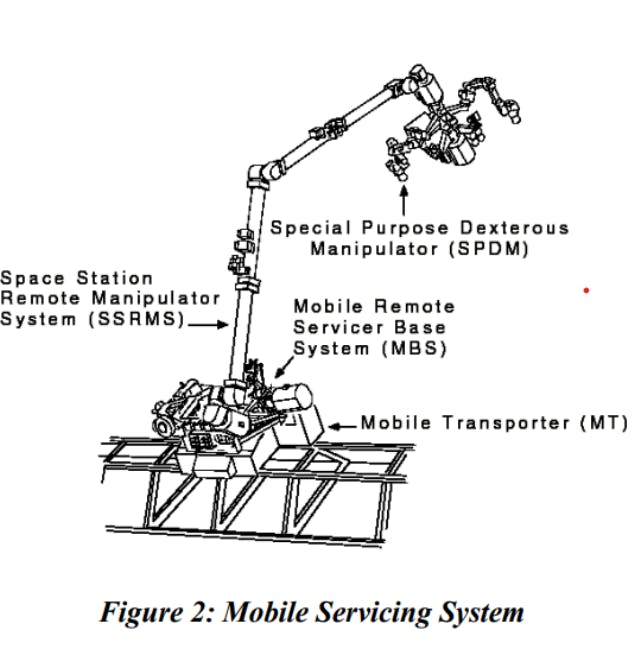
Going back to ISS the Mobile Servicing System (MSS) is the robotic part of the ISS. It's jointly developed by Canada and Nasa.
It is comprised of five subsystems-
the Space Station Remote Manipulator System (SSRMS),
the Mobile Base System(MBS),
the Mobile Transporter (MT),
the Special Purpose Dexterous Manipulator (SPDM),
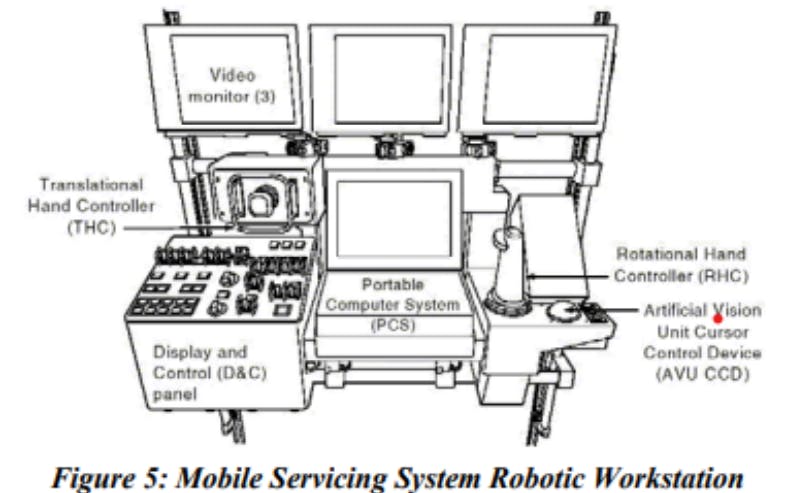
and the Robotic Workstation (RWS).
Again don't freak out with the names these are just fancy names that originated from Latin. Hence these ardent names.
The *Space Station Remote Manipulator System (SSRMS)*is a 17-foot-long manipulator (robotic arm system) consisting of two booms or extensions, seven joints, each with a range of plus or minus 270 degrees and 2 latching end effectors. In the world of robotics, the term end effectors is used so very much. End effectors mean the receptors in the robot. For example, the end effectors in a human body are the hands because we can pick and put things, mouth because we can communicate. Often power, data and video are provided to the payloads via the latching end effectors.
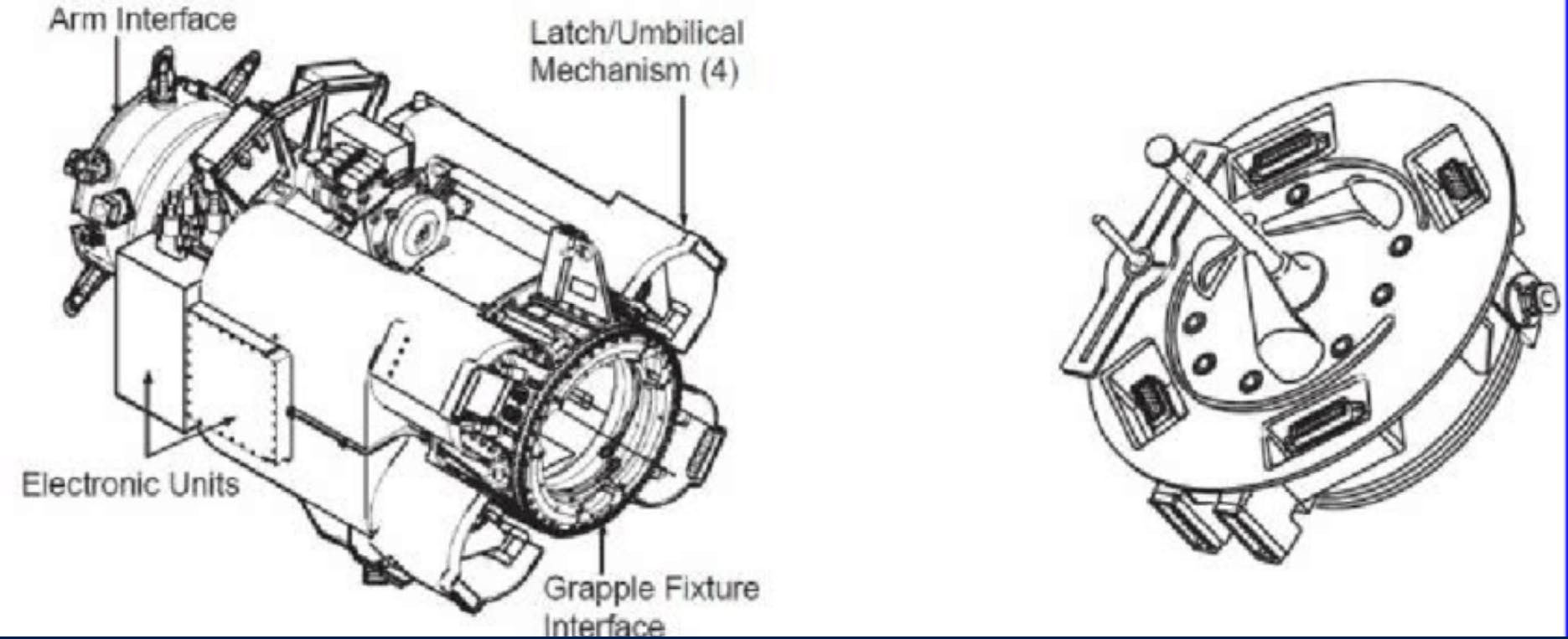
SSRMS's primary purpose was to perform tasks such as capturing and releasing payloads, including satellites and scientific instruments, during space missions. It was also used to support astronauts during extravehicular activities (spacewalks) by providing a stable platform and assisting in moving crew members or equipment.
The Robotic Workstation (RWS ) components are portable and include three video monitors, two hand controllers- one to effect translation and one for rotational inputs, a Display and Control panel, a Portable Computer System (PCS) and a cursor control device. It is used to grapple and berth spacecraft, assemble and repair satellites, and perform other tasks.
The Special Purpose Dexterous Manipulator (SPDM) is a dexterous manipulator, which is a broader term that can refer to any robot arm that is designed to be able to manipulate objects in a precise and controlled manner. It has two symmetrical seven-joint arms attached to a central body structure. Its primary function is the changeout of robotically compatible small equipment on the Space Station's exterior. Additional SPDM tasks include scientific payload servicing and inspection and monitoring in support of extravehicular activities(EVA). The SPDM can either be operated from the end of the SSRMS or as a stand-alone manipulator system.
The Mobile Base System (MBS) provides a mobile base of operation for the Mobile Servicing System (MSS) and serves as an interface between the Mobile Transporter (MT) and the Space Station Remote Manipulator System (SSRMS).
The Mobile Transporter (MT) provides transportation of the SSRMS along the exterior ISS truss. Now what is a truss? A truss is like you know the Godavari bridge right? That is a truss! It's a combination of triangular components.



At its maximum velocity of 2.54 cm/sec, it will take 50 minutes to traverse the entire length of the truss when the ISS is fully assembled.
This is a brief overview of Robotics in ISS and in space. But I guess for a beginner this is a lot to even grasp or read. So in a very fun and creative way, I have summarised this whole article into a poem so have fun recalling.... and Till next time. Btw, Thanks a lot for reading.
Summary in the form of a poem-
In the cosmos, robots play their part.
Aiding astronomy, pushing the boundaries.
Voyagers to planets distance vast.
Martian rovers explore the future's cast.
Chandrayaan's three mission aims high,
Rover and Lander take to the sky.
Their payloads are filled with tech, so cool,
X-rays and spectrometers reveal lunar ground, Chemical secrets, and insights profound.
ISS, a realm of robotic grace,
SSRMS manipulates with great race.
With booms and arms, tasks they master,
From satellites, Precision touch to astronaut plaster.
Intricate mechanisms, trusses guide,
Mobile bases and dexterous arms provide.
Robots dance among the stars,
Revealing secrets, Unraveling wonders.